
Navigation
Satellite based position and attitude determination
A global navigation satellite system (GNSS) – such as the Global Positioning System (GPS) or the future Galileo – can be used for position and attitude determination. Accurate GNSS based positioning is typically achieved with double-differenced carrier phase observations, where the satellite and receiver clock errors are eliminated and the remaining atmospheric delay can be neglected (in case of short baselines). An issue is to resolve the integer phase ambiguities correctly. Moreover, the correlations between the measurements have to be considered if highly accurate results are in the focus. Optimal estimation of the states based on proper state space modeling is under consideration for several applications. A priori knowledge about the dynamics of the platform of interest is incorporated into the estimation approach.
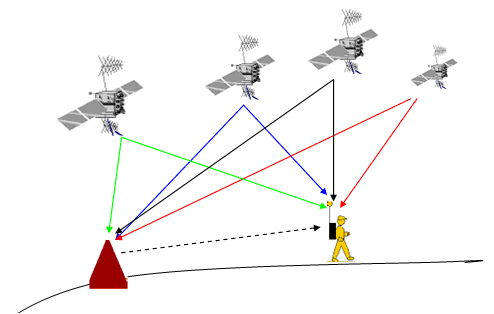
Fig. 1: Positioning using differential GNSS
GNSS can also be used for attitude determination of a platform, where 3 or more antennas are needed to compute the whole attitude parameters. The attitude of the platform is reflected by the alignment of the antenna body frame with respect to a local level frame. The prerequisite of GNSS based attitude determination technique is to calculate the baseline between GNSS antennas. 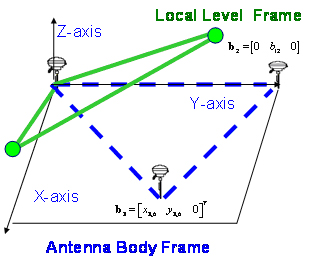
Fig. 2: Antenna body frame and local level frame
Fig. 3 depicts the graphical user interface of a toolbox that has been developed for attitude determination (by post-processing the RINEX data in order to derive the three dimensional Euler angles using C/A code). 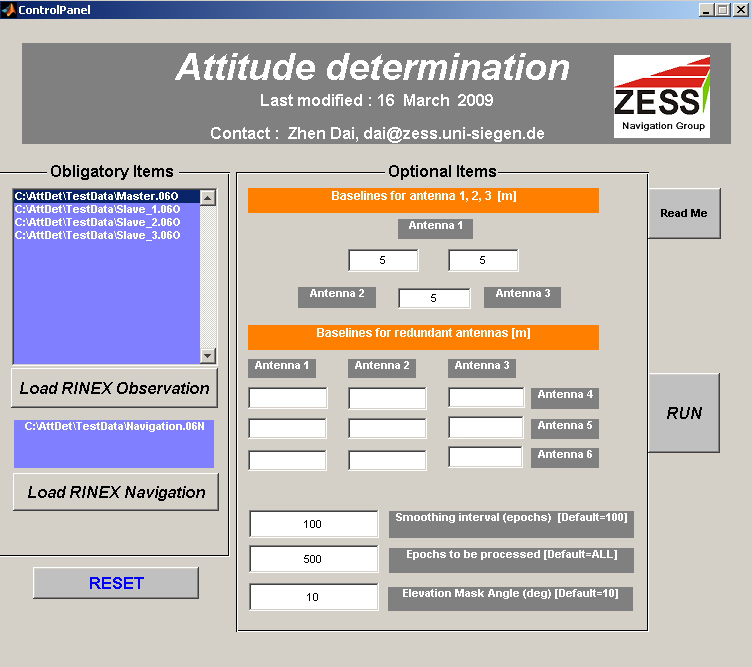
Fig. 3: GUI of the toolbox for attitude determination
Several kinds of GPS receivers are available in our lab. Examples are depicted in Fig. 4.
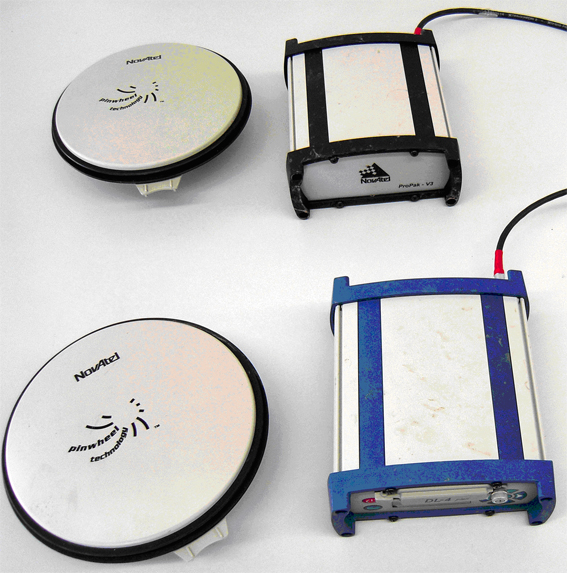
Fig. 4: NovAtel's ProPak-V3 and DL-4 plus GPS receiver
Inertial navigation: using a gyro-free inertial measurement unit
The conventional inertial measurement unit (IMU) consists of three orthogonal gyros that measure angular rotation and three orthogonal accelerometers that measure specific forces. The acceleration is integrated successively to get velocity and position, respectively. Angular rate is also integrated to get the orientation with respect to a fixed inertial frame. Among the advantages of inertial navigation systems (which are based on an IMU and a navigation processor) over other navigation systems is that they are self-contained within the moving platform and hence they do not require any interaction with external environment to operate.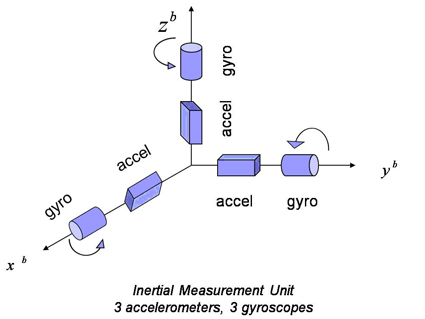
Fig. 5: Conventional inertial measurement unit 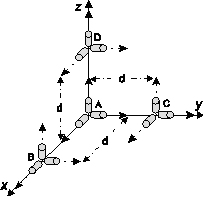
Fig. 6: A gyro-free IMU configuration (12 accelerometer)
In contrast to a conventional IMU, a gyro-free IMU uses a configuration of accelerometers only, to measure acceleration and rotational motion of a rigid body in 3D space. In principle, it benefits from an effect known as lever-arm effect. To have this effect the accelerometers must be distributed in distance over the body. There exists a variety of reasons for using distributed accelerometers to estimate the angular velocity vector. The gyroscope has typically the disadvantage of complicate manufacture technique, high cost, high power consumption, large weight, large volume, and limited dynamic range. Furthermore, low-cost microelectromechanical system (MEMS) gyroscopes have more inherent physical complexities than accelerometers. On the other hand, accelerometers are smaller, less costly, and less power consuming than comparable gyros. Using certain configurations of twelve separate mono-axial accelerometers produces an angular information vector that consists of a 3D angular acceleration vector and six quadratic terms of angular velocities. A Kalman filter is used to fuse the different measurements in the angular information vector. In our estimation approaches we exploit inherent constraints to improve the estimation performance. Moreover, we incorporate the rotating accelerometers in the GF-IMU configuration to have a unique sign solution.
Fig. 7: Experimental inertial sensors used for research
GNSS/INS integration
The sensor data fusion of redundant measurements obtained from a global navigation satellite system (GNSS) and from inertial sensors or inertial navigation systems (INS) is useful because of the complementary characteristics of the measurements. With GNSS/INS integration an accurate, robust and continuous navigation solution can be obtained, regardless of the environment. The integration, the data fusion, is implemented using state space models and appropriate Kalman filtering. For the derivation of a proper (sub)optimal data fusion approach, the application – e.g., expected dynamics of the platform of interest, environment, grade of (inertial) sensors that can be used – has to be taken into consideration. Depending on the application, the coordinate frame for the mechanization can be selected, the components of the state vector can be determined, and (based on an appropriate modeling of relevant sensor errors) the system model can be set up. The integration architectures can be roughly classified as loosely coupled (GNSS receiver and INS are independent off-the-shelf systems), tightly coupled, and deeply coupled (access to the tracking loops in the GNSS receiver is required) approaches.
A developed nonlinear filtering toolbox for low-cost GPS/INS (tightly-coupled) integration is shown in the following figure. The following nonlinear filtering methods are considered: extended Kalman filter (EKF), unscented Kalman filter (UKF), Monte Carlo Kalman filter (MCKF), unscented particle filter (UPF), Monte Carlo particle filter (MCPF). 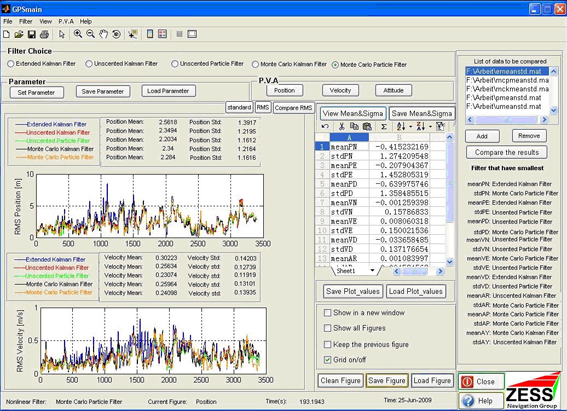
Fig. 8: Nonlinear filtering toolbox on GPS/INS tightly-coupled integration
For research and teaching with respect to deeply-coupled GPS/INS integration, a hardware-in-the-loop system is, for example, in use. The RF GPS signal simulator NavX-NCS from Ifen GmbH is used to generate GPS signals according to trajectories of interest. The Open source GPS receiver GPS1005 from GPSCreations is used for the integration. It provides the access to the GPS receiver tracking loops, i.e., PLL/FLL and DLL. The IMU specific force and angular rate measurements are obtained from the low-cost MEMS-based IMU MTi from Xsens Technologies B.V. or simply simulated. The equipment used in the hardware-in-the-loop system is shown in the following figure.
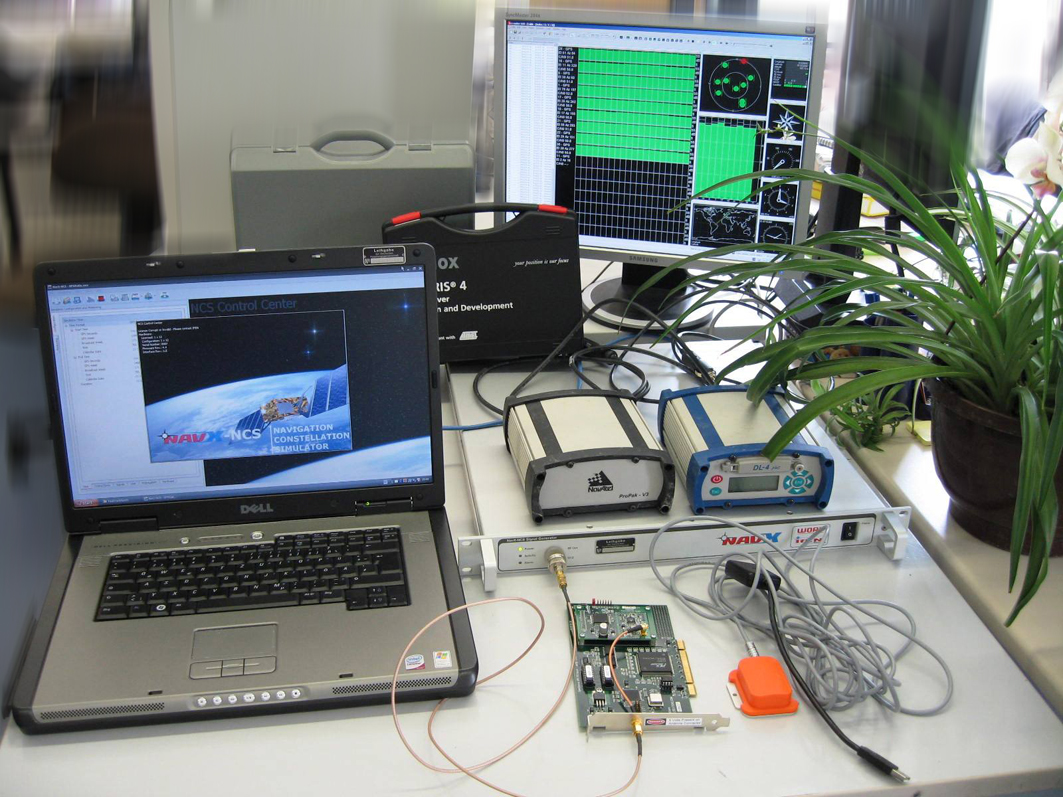
Fig.9: Hardware-in-the-loop system, and more equipment
Positioning in GSM networks
Using the attributes of the radio signals exchanged between a Mobile Station (MS) and multiple Base Transceiver Stations (BTSs) in Global System for Mobile communications (GSM) networks, the position of the MS can be determined. The measurements include Time of Arrival (TOA), Time Difference of Arrival (TDOA), Angle of Arrival (AOA), and Received Signal Strength (RSS). To obtain a unique position, the basic principle is the triangulation technique, which uses the geometric properties of triangles to compute the mobile location. Since the radio signals in GSM networks are designed for the purpose of voice and data transmission rather than positioning, the resolution of the measurements related to position determination is very coarse. Therefore, optimal estimation algorithms and data fusion approaches are applied in our work in order to obtain an accurate mobile location estimate. Moreover, for vehicle applications where the MS is strictly linked to road networks, the a priori knowledge of the road networks obtained from digital map databases provide additional information facilitating the position estimation. Kalman filter based algorithms are developed to integrate different types of measurements.
Triangulation: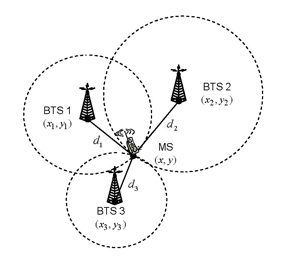
Fig. 10: TOA
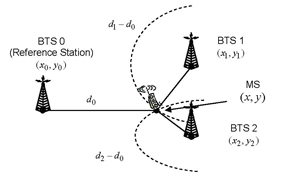
Fig. 11: TDOA
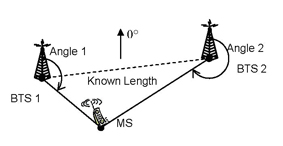
Fig. 12: AOA
Real-time embedded GNSS/INS integration
Accurate navigation at low cost is needed in various real-time applications such as vehicle tracking, unmanned aerial vehicles (UAVs) etc. Making use of the complementary characteristics of GNSS and INS derived measurements GNSS/INS integration approaches yield navigation solutions with better performance. However, the embedded applications require not only the accurate position and attitude information, but also strict real-time abilities, such as system efficiency, reliability and feasibility, as well as the size and cost.
The hardware configuration of a GNSS/INS integrated system is composed of three functional blocks, as indicated in Fig. 13: Sensing block, interfacing block and a central processing block as the kernel. Based on devices manufactured in the latest microelectromechanical system (MEMS) technology, a prototype of low-cost GNSS/INS integrated system is developed to investigate the integration algorithm and the real-time system performance. This prototype is composed of a low-cost off-the-shelf MEMS-based inertial measurement unit (IMU), a compact commercial GPS receiver, a digital signal processing (DSP) platform and a asynchronous communications element (ACE) for interfacing the GPS receiver and the IMU with the DSP platform. The hardware architecture is shown in Fig. 14 with the hardware elements shown in Fig. 15.
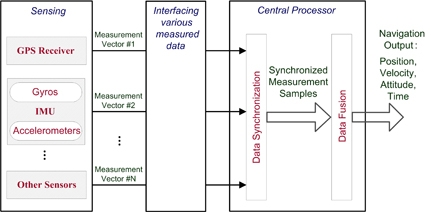
Fig. 13: Hardware configuration of a GNSS/INS integrated system
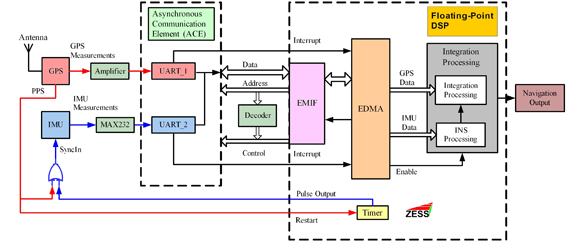
Fig. 14: Hardware architecture of the low-cost GNSS/INS integrated prototype
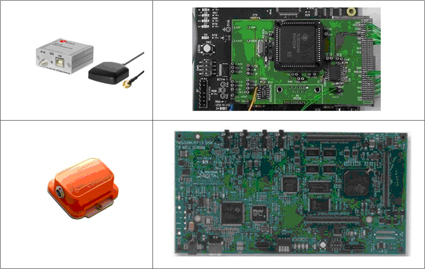
Fig. 15: Hardware elements of the low-cost GNSS/INS integrated prototype
Team
Former team members:
Dr.-Ing. Stefan Knedlik (Team Leader), Dr.-Ing. Miao Zhang, Dr.-Ing. Ezzaldeen Edwan, Dr.-Ing. Zhen Dai, Dr.-Ing. Junchuan Zhou, M.Sc. Jieying (Cathy) Zhang, Dr.-Ing. Pakorn Ubolkosold and Dr.-Ing. Franck Tchere