


Robotische Superkräfte stärken

Im Forschungsprojekt GINA erforschen WissenschaftlerInnen der Uni Siegen, wie Menschen und Roboter erfolgreich miteinander leben können – und worauf sich EntwicklerInnen zukünftig konzentrieren sollten.
Als Rasenmäher oder Staubsauger sind Roboter schon heute sehr beliebt – darüber hinaus sind sie in privaten Häusern oder im öffentlichen Raum aber eher selten anzutreffen. Dabei gäbe es einiges, was Roboter in Zukunft für uns erledigen könnten: Beim Einkaufen helfen, Getränke reichen, Dinge transportieren, kochen, uns unterhalten oder sogar Pflegeaufgaben übernehmen. Roboter sind dabei ganz anders, als viele Geräte, die wir täglich nutzen: Sie können sich selbstständig bewegen und aktiv auf Menschen zugehen, manche können sogar mit ihren NutzerInnen reden. Doch wie sollten Roboter aussehen und welche Fähigkeiten benötigen sie im Einzelfall, um erfolgreich mit Menschen zusammenzuleben?
Im Forschungsprojekt GINA (Hochwertig gestaltete Interaktionsstrategien für Service- und Assistenzrobotik) untersuchen  WissenschaftlerInnen der Uni Siegen zusammen mit Partnern, was eine „gute“ Mensch-Roboter-Interaktion ausmacht. Gleichzeitig begleiten und unterstützen sie bundesweit acht Projekte zur Entwicklung unterschiedlicher Assistenz-Roboter. Bei einem großen Vernetzungstreffen in Berlin kamen jetzt Beteiligte aus allen Projekten und weitere Robotik-ExpertInnen zusammen, um darüber zu diskutieren, wie Roboter Teil unseres Alltags werden können. Sollten Roboter optisch Menschen ähneln, eher nüchtern und funktional oder ganz anders gestaltet sein? Wollen wir uns bei unserem Roboter für seine Arbeit bedanken? In welchen Kontexten sollte ein Roboter sprechen können – und in welchen macht eine Sprachfunktion keinen Sinn? Solche und ähnliche Fragen standen im Mittelpunkt des Treffens.
WissenschaftlerInnen der Uni Siegen zusammen mit Partnern, was eine „gute“ Mensch-Roboter-Interaktion ausmacht. Gleichzeitig begleiten und unterstützen sie bundesweit acht Projekte zur Entwicklung unterschiedlicher Assistenz-Roboter. Bei einem großen Vernetzungstreffen in Berlin kamen jetzt Beteiligte aus allen Projekten und weitere Robotik-ExpertInnen zusammen, um darüber zu diskutieren, wie Roboter Teil unseres Alltags werden können. Sollten Roboter optisch Menschen ähneln, eher nüchtern und funktional oder ganz anders gestaltet sein? Wollen wir uns bei unserem Roboter für seine Arbeit bedanken? In welchen Kontexten sollte ein Roboter sprechen können – und in welchen macht eine Sprachfunktion keinen Sinn? Solche und ähnliche Fragen standen im Mittelpunkt des Treffens.
„Es ist unrealistisch, einen multifunktionalen Roboter zu entwickeln, der ähnlich eines Menschen die verschiedensten praktischen und sozialen Aufgaben übernehmen kann und mit den unterschiedlichsten Situationen zurechtkommt“, sagt GINA-Projektleiterin Dr. Diana Löffler. Es gehe eher darum, Roboter dem jeweiligen Kontext anzupassen, in dem sie eingesetzt werden sollen. „Wenn ein Roboter im öffentlichen Raum agiert – zum Beispiel einen Bahnhof reinigt – ist es nicht unbedingt sinnvoll, ihn als sprechenden Roboter zu konzipieren. Dann fangen die Menschen an, mit ihm zu diskutieren, wer jetzt wem ausweichen soll“, erklärt Löffler.
Statt den Menschen zu kopieren, sollten sich die Entwickler eher auf die ganz eigenen und besonderen Fähigkeiten von Robotern konzentrieren, sagen Diana Löffler und Co-Projektleiterin Judith Dörrenbächer. Sie nennen diese Fähigkeiten „Robotische Superkräfte“: So langweilen sich Roboter nicht, sie kennen kein Schamgefühl, reagieren nicht beleidigt, wenn sie mal beschimpft werden und sind auch nicht genervt, wenn ihnen jemand fünf Mal hintereinander dieselbe Frage stellt. Die Wissenschaftlerinnen plädieren dafür, diese Superkräfte zu stärken und Roboter als eigene Spezies zu betrachten, die in bestimmten Situationen sogar besser „funktioniert“, als der Mensch. „Zum Beispiel könnte ein Roboter als Einkaufshelfer Dinge kaufen, die der Nutzerin oder dem Nutzer peinlich sind. Vielleicht wäre es für manche Pflegebedürftige auch angenehmer, sich von einem Roboter waschen zu lassen, der sie nicht sehen kann“, sagt Dörrenbächer.
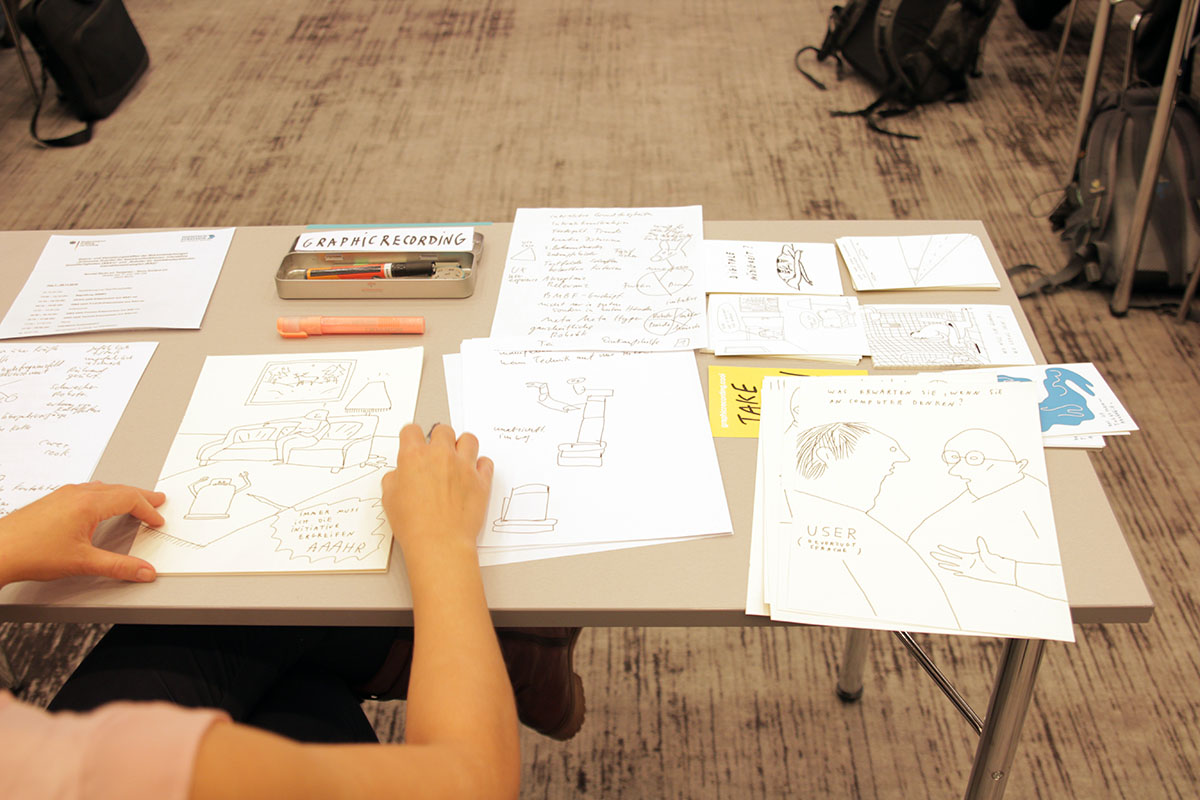 Damit sich Menschen mit Robotern wohlfühlen, müssen nicht nur die späteren NutzerInnen in den Entwicklungsprozess einbezogen werden, sondern auch viele weitere Disziplinen. Zu der Berliner Tagung hatte das GINA-Team darum auch externe Gäste eingeladen: Neben BürgerInnen gehörten dazu der Designer James Auger und die Illustratorin Johanna Benz, die die Veranstaltung zeichnerisch begleitete und kommentierte. „Es ist sehr wichtig, immer auch einen Blick von außen zu haben, um kritische Punkte frühzeitig zu erkennen und mitzudenken“, erklärt Judith Dörrenbächer. Sogar die Perspektive der Roboter selbst hatten die TeilnehmerInnen der Veranstaltung bereits eingenommen: Mit Prothesen, Infrarot-Brillen und anderen Hilfsmitteln simulierten sie die Wahrnehmung von Robotern wie fokussiertes Hören oder Infrarot-Sehen. „Wenn sich die EntwicklerInnen in ihre eigenen Roboter hineinversetzen, bekommen sie ein besseres Gefühl für deren Fähigkeiten – und dafür, wie sich diese sinnvoll einsetzen lassen“, sagen Dörrenbächer und Löffler, die diese Prototyping-Methode an der Uni Siegen entwickelt haben.
Damit sich Menschen mit Robotern wohlfühlen, müssen nicht nur die späteren NutzerInnen in den Entwicklungsprozess einbezogen werden, sondern auch viele weitere Disziplinen. Zu der Berliner Tagung hatte das GINA-Team darum auch externe Gäste eingeladen: Neben BürgerInnen gehörten dazu der Designer James Auger und die Illustratorin Johanna Benz, die die Veranstaltung zeichnerisch begleitete und kommentierte. „Es ist sehr wichtig, immer auch einen Blick von außen zu haben, um kritische Punkte frühzeitig zu erkennen und mitzudenken“, erklärt Judith Dörrenbächer. Sogar die Perspektive der Roboter selbst hatten die TeilnehmerInnen der Veranstaltung bereits eingenommen: Mit Prothesen, Infrarot-Brillen und anderen Hilfsmitteln simulierten sie die Wahrnehmung von Robotern wie fokussiertes Hören oder Infrarot-Sehen. „Wenn sich die EntwicklerInnen in ihre eigenen Roboter hineinversetzen, bekommen sie ein besseres Gefühl für deren Fähigkeiten – und dafür, wie sich diese sinnvoll einsetzen lassen“, sagen Dörrenbächer und Löffler, die diese Prototyping-Methode an der Uni Siegen entwickelt haben.
Als Begleitprojekt wird GINA die acht vom Bundesministerium für Bildung und Forschung (BMBF) geförderten Robotik-Projekte noch zwei Jahre lang intensiv unterstützen. Dabei geht es darum, den gegenseitigen Austausch der Projekte untereinander zu fördern und aktuelle Forschungsfragen und Erkenntnisse zu hochwertiger Mensch-Roboter-Interaktion beizusteuern und gemeinsam zu vertiefen. Auch GINA wird im Rahmen des Programms „Technik zum Menschen bringen“ vom BMBF gefördert. An der Universität Siegen ist es im Bereich der Wirtschaftsinformatik am Lehrstuhl für „Ubiquitous Design“ von Prof. Dr. Marc Hassenzahl verortet. Weitere Informationen zu GINA finden Sie unter www.ginarobot.com.
Kontakt:
Judith Dörrenbächer
E-Mail: judith.doerrenbaecher@uni-siegen.de
Dr. Diana Löffler
E-Mail: diana.loeffler@uni-siegen.de
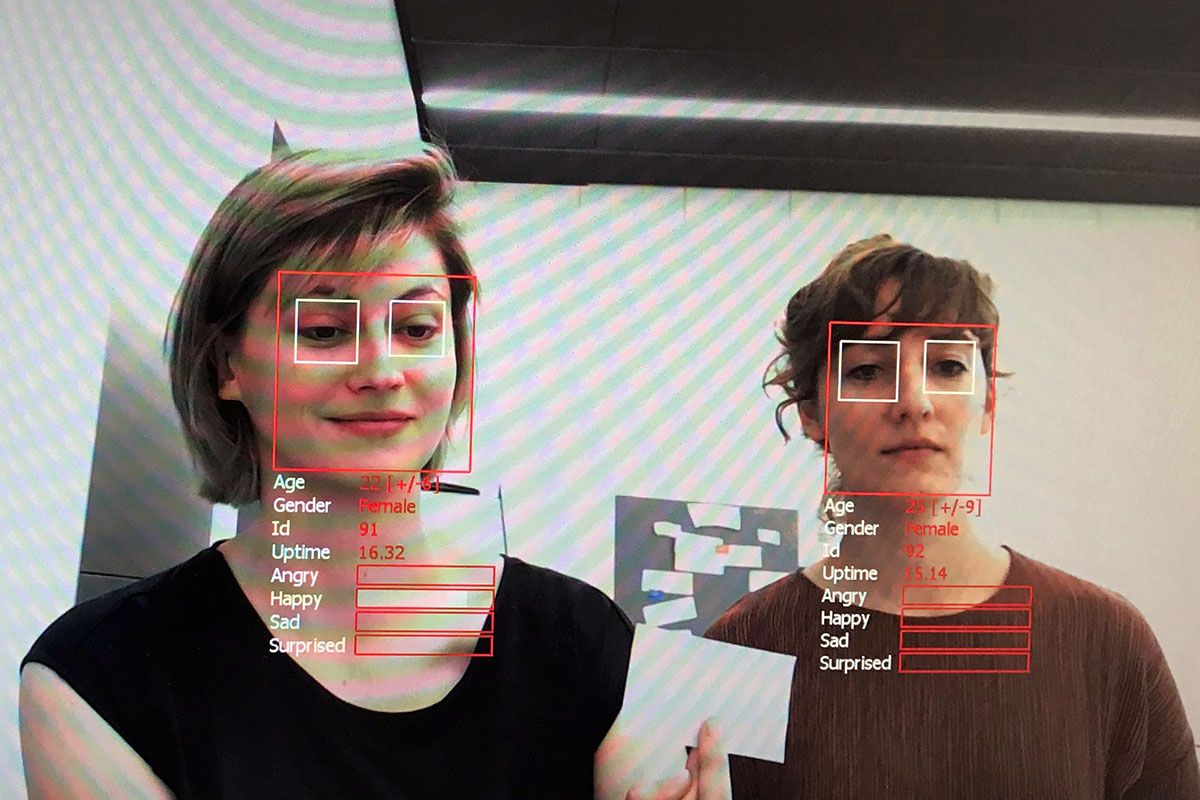
Die GINA-Projektleiterinnen Dr. Diana Löffler (l.) und Judith Dörrenbächer (r.) aus der Sicht eines Roboters.